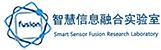


智慧信息融合五层技术:
目标融合、点云融合、认知融合、分阶融合、混合融合。
围绕智慧信息融合中的感控一体化设计:
感知、预测、传感器参数控制(即,仅软控制)。
产生7-D的世界模型:
位置、动态、形态、类别及时空关联。
旨在提供专业的智慧信息融合系统解决方案,建立多传感器数据中心、算法平台、软硬件系统及工业物联平台。
-
Reveals the concepts of stochastic state space and state space modeling to unify the idea. Supports further exploration through a unified and logically consistent view of the subject.
-
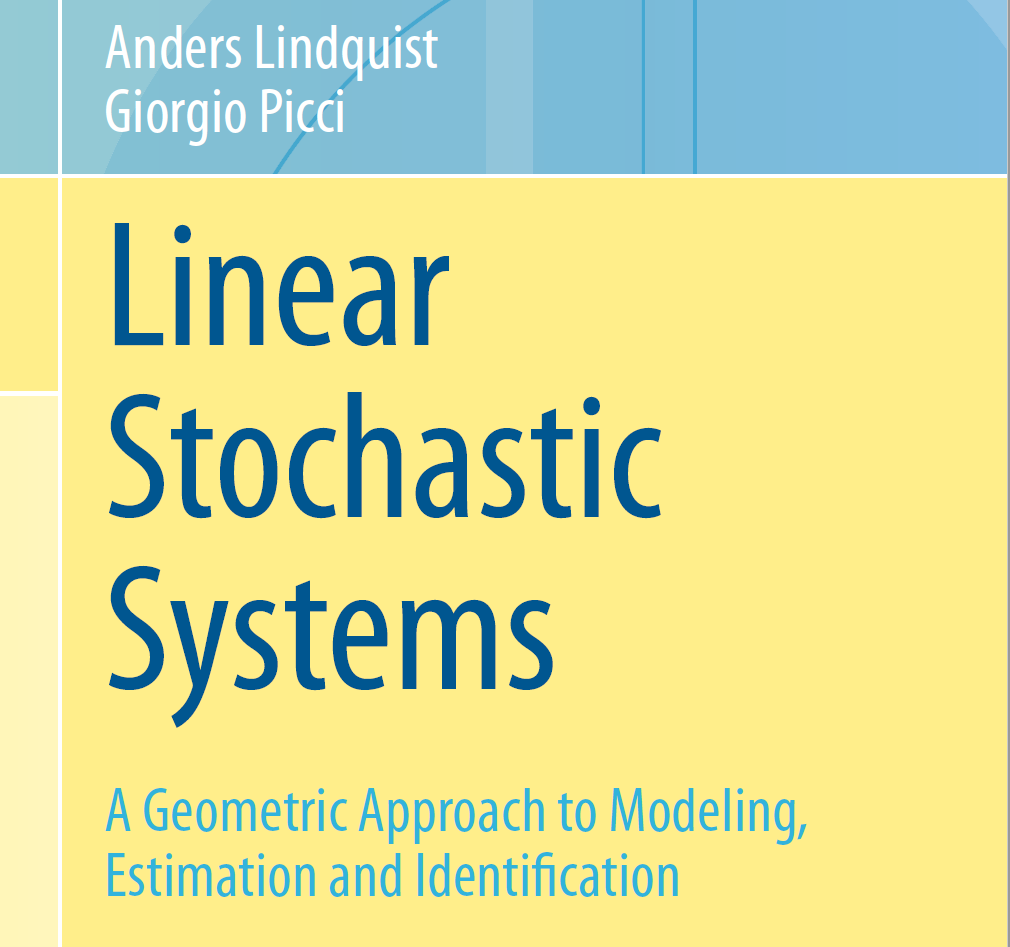
In short, the method of moments involves equating sample moments with theoretical moments. So, let's start by making sure we recall the definitions of theoretical moments, as well as learn the definitions of sample moments.
-
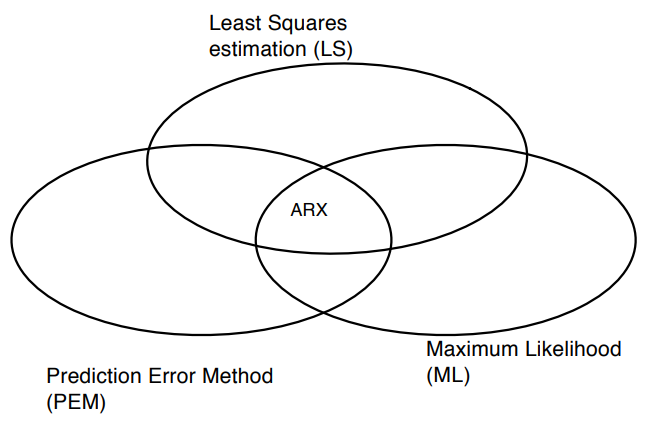
This chapter studies the parameter estimation technique called the Prediction Error Method (PEM). The idea is that rather than a plain least squares approach, or a statistical maximum likelihood approach there is a third important principle in use for estimating the parameters of a dynamic model based on recorded observations. This technique considers the accuracy of the predictions computed for the observations, rather than the model mismatch are the likelihood of the corresponding statistical model. This technique is perhaps the most tightly connected to systems theory as it explicitly exploits the dynamical structure of the studied system. Those three design principles are represented schematically in Fig. (6.1). In a number of cases the three design decision leads to the same estimators as will be discussed in some detail
-

2019/03
In general, the Image Sensor processes the basic information of the object collected by the lens before sending it to the ISP for serialized transmission. LVDS-based transmission on coaxial cable or twisted pair, as well as direct transmission via Ethernet, are two further options.
-
2019/09
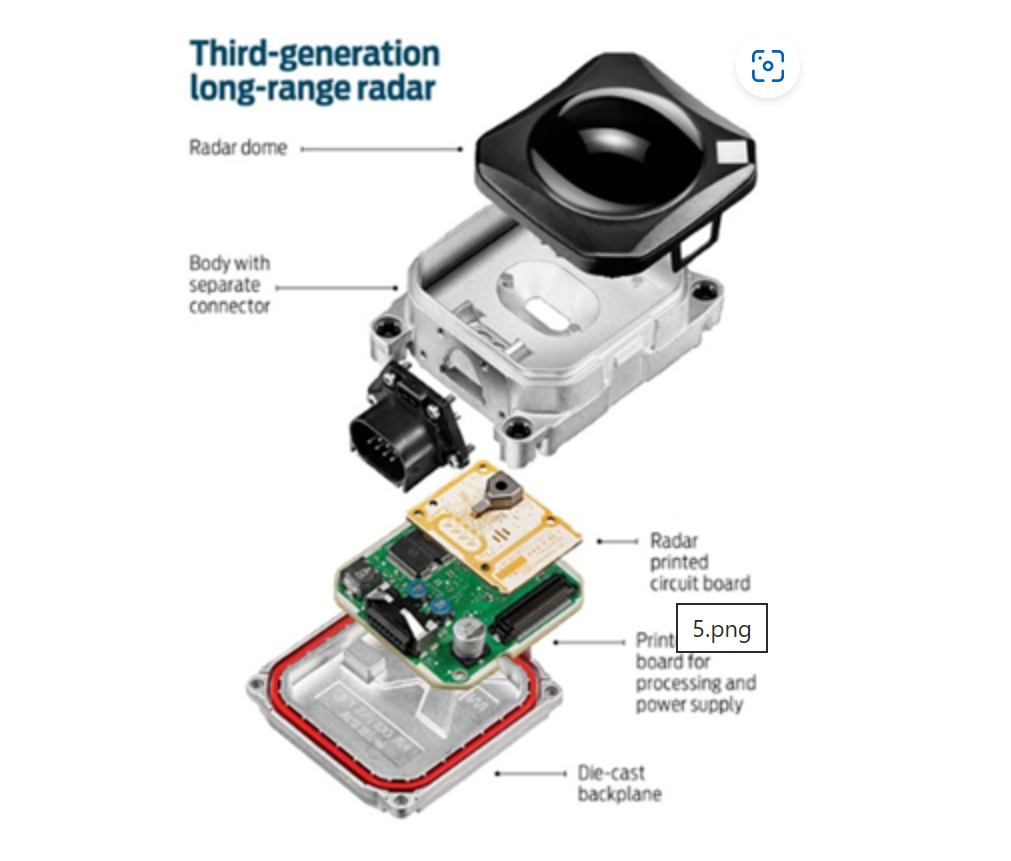
Radar is essentially an electromagnetic wave that is reflected after being obstructed by objects on its transmission route. The distance, speed, and angle of the item can be determined by collecting the reflected signal. Millimeter-wave radar may produce electromagnetic wave signals with wavelengths of 1-10mm and frequencies of 30-300GHz.
-
2023/01
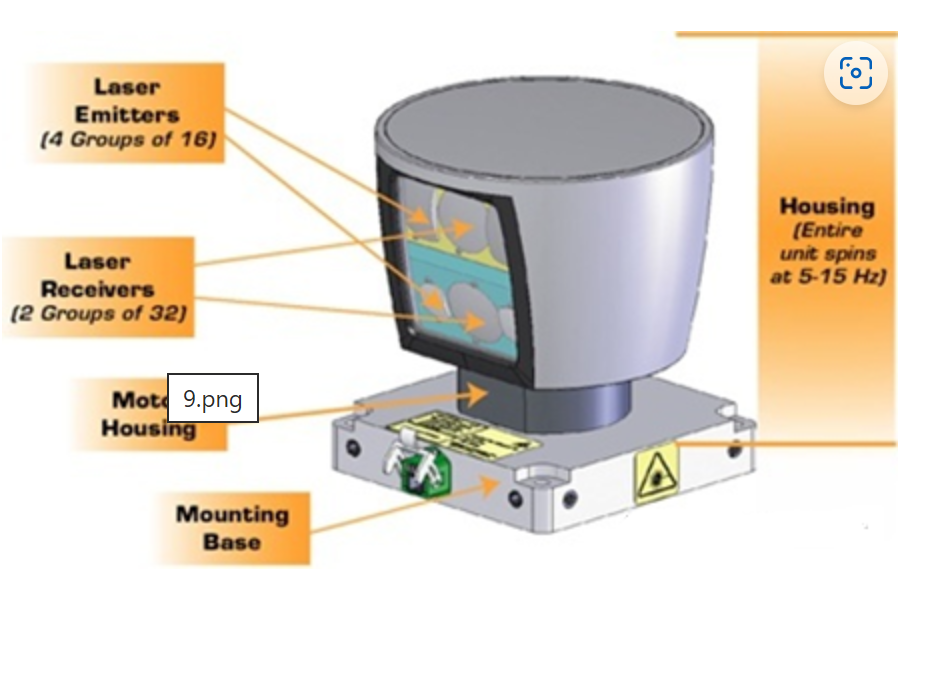
The point cloud measurement necessitates accurate installation positioning, and the mechanical structure necessitates a complicated mechanical structure. Given the effects of the environment and aging, the average failure duration is just 1000-3000 hours, making it impossible to meet the automobile factory's minimum requirement of 13000 hours. Furthermore, because LiDAR is mounted on the car's roof, civil engineers must address external maintenance difficulties such as the influence of car washing. As a result, mechanical construction severely restricts the cost and promotion of the application.
-
2019/03
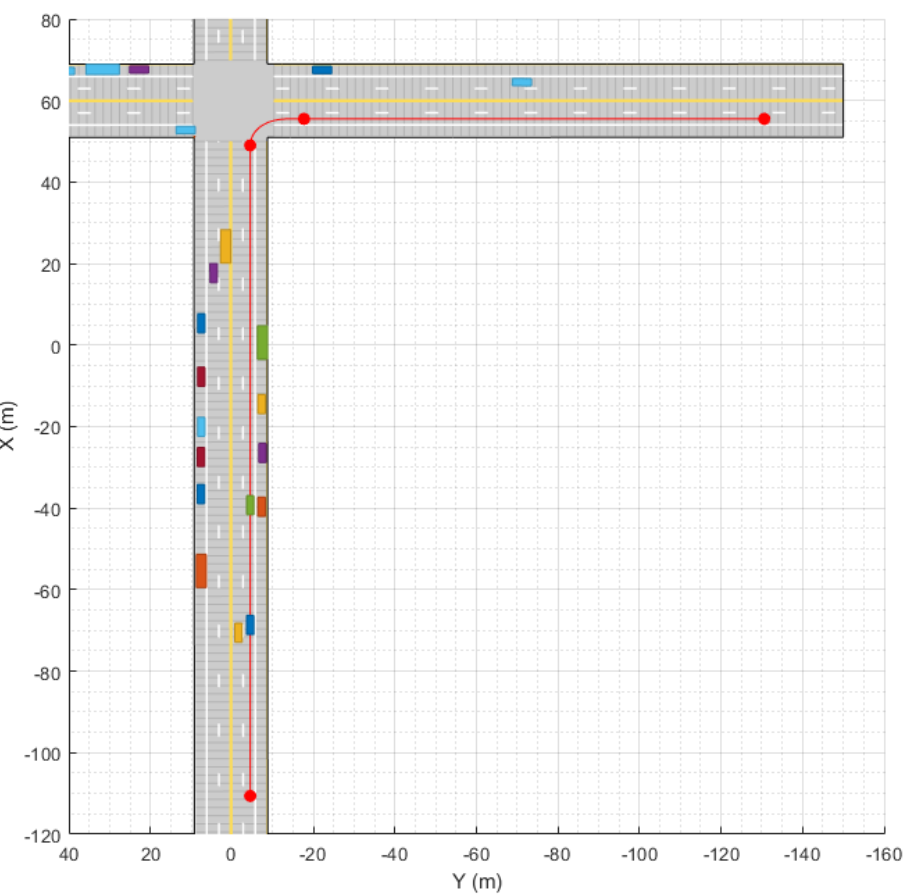
In the presence of dynamic obstacles in the environment, a local motion planner requires short-term predictions of the information about the surroundings to assess the validity of the planned trajectories. The choice of environment representation is typically governed by the upstream perception algorithm. For planning algorithms, the object-based representation offers a memory-efficient description of the environment. It also allows for an easier way to define inter-object relations for behavior prediction. On the other hand, a grid-based approach allows for an object-model-free representation, which assists in efficient collision-checking in complex scenarios with large number of objects. The grid-based representation is also less sensitive to imperfections of object extraction such as false and missed targets. A hybrid of these two approaches is also possible by extracting object hypothesis from the grid-based representation.
-

2019/09
There has been an ever-increasing interest in multi-disciplinary research on multisensor data fusion technology, driven by its versatility and diverse areas of application. Therefore, there seems to be a real need for an analytical review of recent developments in the data fusion domain. This paper proposes a comprehensive review of the data fusion state of the art, exploring its conceptualizations, benefits, and challenging aspects, as well as existing methodologies. In addition, several future directions of research in the data fusion community are highlighted and described.
-
2023/01
Vehicle autonomy and driver assistance systems rely on a combination of a balanced mix of technologies: RADAR (RAdio Detection And Ranging), LiDAR (LIght Detection And Ranging), cameras and V2X (vehicle -to-everything) communications. These technologies often have overlapping capabilities, but each has its own strengths and limitations.